 PDF(3331 KB)
PDF(3331 KB)
 PDF(3331 KB)
PDF(3331 KB)
 PDF(3331 KB)
PDF(3331 KB)
联合地基激光雷达与无人机影像的树种识别
Tree species identification of combined TLS date and UAV images
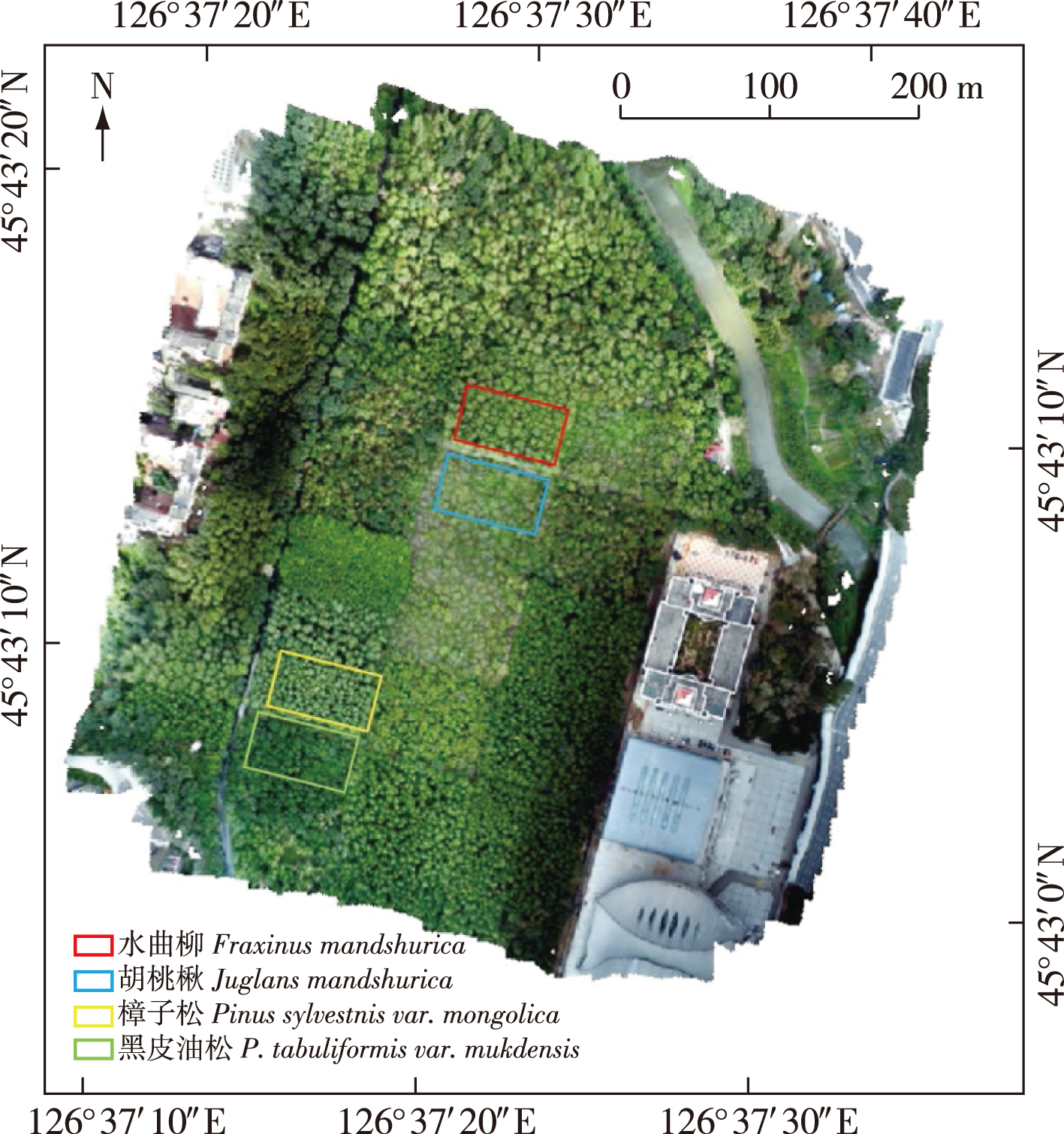
【目的】应用遥感技术进行树种识别已成为森林调查的重要手段之一,但利用近地面遥感手段进行树种识别时存在地基激光雷达(LiDAR)点云数据树冠上层信息不足和无人机影像树冠下层的信息缺失的问题,联合多源遥感数据快速准确识别树种,对研究和保护森林资源具有重要意义。【方法】以哈尔滨市东北林业大学城市林业示范基地中樟子松(Pinus sylvestris var. mongolica)、黑皮油松(P. tabuliformis var. mukdensis)、水曲柳(Fraxinus mandshurica)、胡桃楸(Juglans mandshurica)为研究对象进行树种识别研究,获取地基LiDAR与无人机影像数据,通过对高重叠度无人机影像进行处理得到无人机影像点云,将无人机影像点云与地基LiDAR点云数据进行配准融合,对融合后数据进行单木分割得到单木点云,基于单木点云提取形状特征、结构特征、树干颜色特征和树冠颜色特征,借助支持向量机分类算法进行树种识别并结合随机森林算法对不同特征的识别能力进行了分析。【结果】利用所有特征进行树种识别取得试验最优结果,其总精度和Kappa 系数分别为93.48%和0.91。相较于其他对比方案,其总精度和Kappa 系数分别提升4.35~16.31个百分点和0.06~0.22。【结论】提出了一种地基LiDAR数据与无人机影像点云数据进行融合的树种识别方法,该方法能够在一定程度上弥补树种识别中特征提取时地基LiDAR点云数据树冠上层信息不足,以及无人机影像树冠下层信息缺失等问题。充分利用多源数据所包含的丰富信息进行树种识别,可有效提高树种识别精度。
【Objective】Rapid and accurate identification of tree species is crucial for the research and protection of forest resources. Identification of tree species by remote sensing technology has become an important method of forest investigation. However, there are some problems in tree species identification by remote sensing, such as a lack of information in the upper canopy of terrestrial laser scanning (TLS) data and the lower canopy of unmanned aerial vehicle (UAV) images. Therefore, identifying tree species requires multi-source remote sensing data.【Method】In this study, Pinus sylvestris var. mongolica, P. tabuliformis var. mukdensis, Fraxinus mandshurica and Juglans mandshurica in the urban forestry demonstration base of Northeast Forestry University at Harbin were used as the research objects to identify tree species. TLS point cloud data and UAV image data were acquired. Through the processing of UAV images, the photogrammetric point cloud and orthophoto image were obtained. The UAV image point cloud and TLS point cloud data were registered and fused, then divided into single tree points. Based on the single tree point cloud, shape features, structure features, tree trunk color features, and crown color features were extracted, and tree species identification was performed by a support vector machine classification algorithm. Subsequently, the ability of the method to identify tree species using different characteristics was analyzed by random forest algorithm.【Result】Optimal results were obtained when all the features were used to identify tree species. The total accuracy and Kappa coefficient of tree species identification results were 93.48% and 0.91, respectively, which were improved by 4.35-16.31percentage points and 0.06-0.22, respectively, compared with other comparison schemes.【Conclusion】The tree species recognition method based on the fusion of TLS data and UAV image point cloud data proposed in this study can compensate for the lack of information in the upper canopy of TLS point cloud data and the lower canopy of UAV images to a certain extent, and make full use of the rich information contained in multi-source data for tree species recognition. The method can effectively improve the accuracy of tree species identification.
tree species identification / multi-source remote sensing / LiDAR / unmanned aerial rehicle (UAV) images
| [1] |
|
| [2] |
|
| [3] |
李增元, 陈尔学. 中国林业遥感发展历程[J]. 遥感学报, 2021, 25(1):292-301.
|
| [4] |
|
| [5] |
曹林, 佘光辉, 代劲松, 等. 激光雷达技术估测森林生物量的研究现状及展望[J]. 南京林业大学学报(自然科学版), 2013, 37(3):163-169.
|
| [6] |
|
| [7] |
黄华国. 林业定量遥感研究进展和展望[J]. 北京林业大学学报, 2019, 41(12):1-14.
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
刘清旺, 李世明, 李增元, 等. 无人机激光雷达与摄影测量林业应用研究进展[J]. 林业科学, 2017, 53(7):134-148.
|
| [14] |
|
| [15] |
陈向宇, 云挺, 薛联凤, 等. 基于激光雷达点云数据的树种分类[J]. 激光与光电子学进展, 2019, 56(12):203-214.
|
| [16] |
|
| [17] |
廖小罕, 肖青, 张颢. 无人机遥感:大众化与拓展应用发展趋势[J]. 遥感学报, 2019, 23(6):1046-1052.
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
张吴明, 李丹, 陈一铭, 等. 联合地基激光雷达与无人机摄影测量技术提取树高研究[J]. 北京师范大学学报(自然科学版), 2018, 54(6):764-771.
|
| [25] |
曹明兰, 李亚东, 冯海英, 等. 倾斜摄影与激光扫描技术结合的3D森林景观建模[J]. 中南林业科技大学学报, 2019, 39(12):10-15,33.
|
| [26] |
王楚虹, 刘浩然, 钟浩, 等. 联合UAV-LiDAR和HMLS技术的森林样地点云数据融合[J]. 中南林业科技大学学报, 2022, 42(3):26-38.
|
| [27] |
黎华, 凯吾沙·塔依尔, 林木森, 等. 改进拟牛顿算法的点云稠密化应用研究[J]. 测绘科学, 2021, 46(12):83-90.
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
杨龙, 孙中宇, 唐光良, 等. 基于微型无人机遥感的亚热带林冠物种识别[J]. 热带地理, 2016, 36(5):833-839.
|
| [32] |
杜培军, 夏俊士, 薛朝辉, 等. 高光谱遥感影像分类研究进展[J]. 遥感学报, 2016, 20(2):236-256.
|
| [33] |
童庆禧, 张兵, 张立福. 中国高光谱遥感的前沿进展[J]. 遥感学报, 2016, 20(5):689-707.
|
| [34] |
|
| [35] |
刘嘉政, 王雪峰, 王甜. 基于深度学习的树种图像自动识别[J]. 南京林业大学学报(自然科学版), 2020, 44(1):138-144.
|
/
| 〈 |
|
〉 |







