 PDF(4419 KB)
PDF(4419 KB)

Pointwise detection of street tree crown point clouds based on mobile laser scanning
LI Qiujie, LI Xiangcheng
Journal of Nanjing Forestry University (Natural Sciences Edition) ›› 2024, Vol. 48 ›› Issue (1) : 205-213.
PDF(4419 KB)
 PDF(4419 KB)
PDF(4419 KB)
Pointwise detection of street tree crown point clouds based on mobile laser scanning
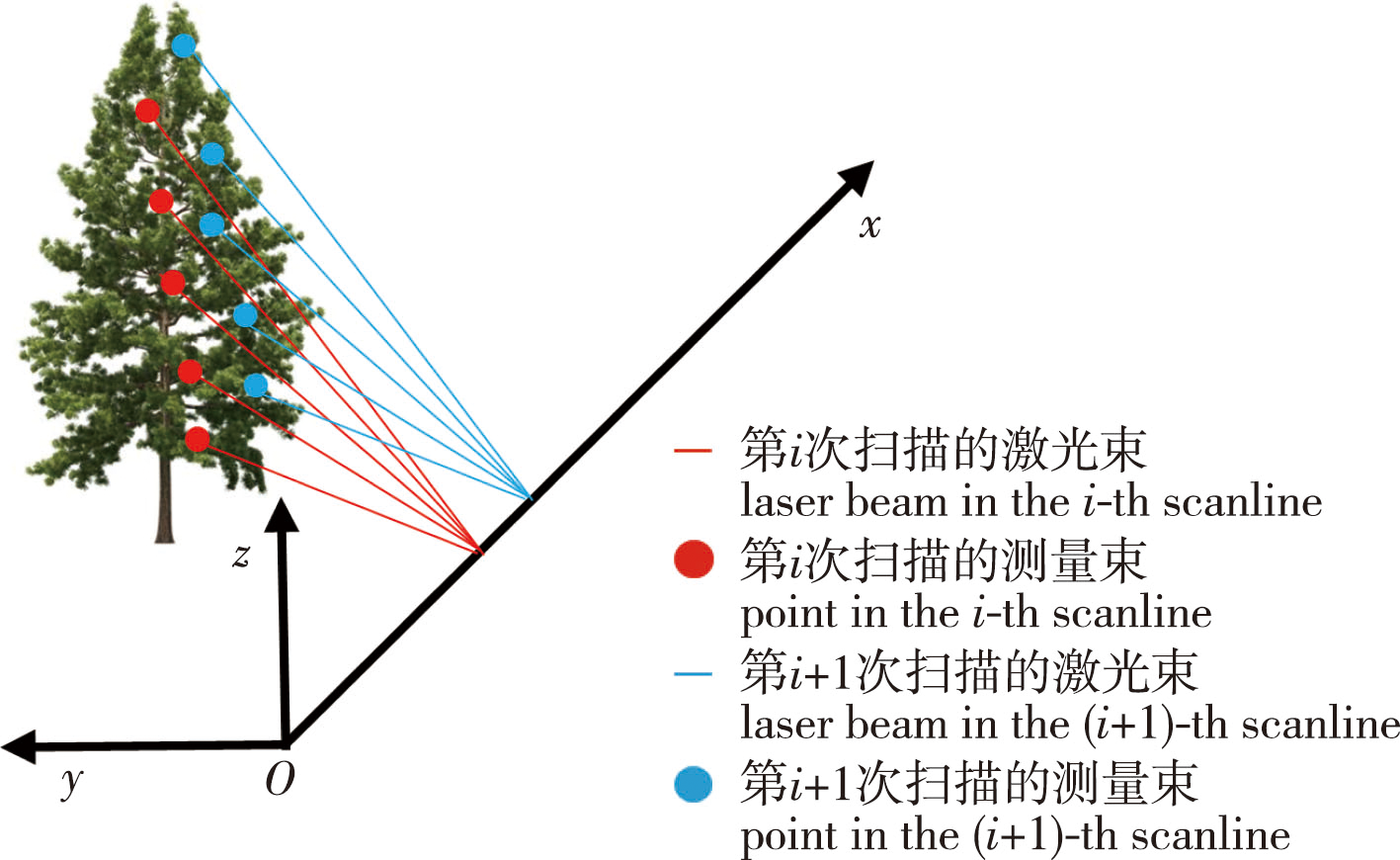
【Objective】 To address the problem of online detection of street-tree crowns, this study proposes a pointwise detection method for the point cloud of street-tree crowns based on mobile laser scanning (MLS), and generates a high-performance tree-crown detector capable of online, fast and accurate detection of the point cloud of street-tree crowns to provide basic data for street-tree-targeted spraying. 【Method】 The MLS system equipped with a 2D LiDAR (light detection and ranging) was used to collect the street contour measurement data in real time, and five attributes such as three-dimensional coordinates, primary echo intensity and number of echoes were extracted; a δ spherical neighborhood search method was built to realize online and fast query of point cloud neighborhood; seven kinds of local features of point cloud such as width, depth, height, dimensionality, density, number of echoes and echo intensity were extracted from the spherical domain of the point to be identified; the supervised learning algorithm was used to fuse the local features of point cloud and train a crown detector to predict the category of the point to be identified. 【Result】 The point cloud data of a 137 m long street were collected, and four comparative experiments of neighborhood search methods, supervised learning algorithms, local features of point clouds, and pointwise crown detectors were conducted. The experimental results show that the query time of the proposed δ spherical neighborhood search method is 10.90% of that of k-D tree; among the four supervised learning algorithms of neural network (NN), support vector machine (SVM), Boosting and random forest (RF), the classification performance of the crown detector trained by RF is the best; compared with single kind of features, combined features have better generalization performance; the pointwise crown detector designed by this paper is obviously superior to the existing method in terms of detection accuracy and efficiency. When the radius δ changes within the range of 0.1-1.0 m, the F1 score on the test set is ≥ 97.74%. 【Conclusion】 The proposed method can quickly and accurately detect street-tree crown point clouds from MLS point-cloud data collected in real time and provide a spray prescription map for targeted spraying applications on street trees.
targeted spraying / street tree / crown point cloud detection / pointwise classification / mobile laser scanning
| [1] |
袁琨, 郭佳, 陆哲明, 等. 篱垣型垂直绿化的减噪能力及其影响因素[J]. 中国城市林业, 2021, 19(4):67-71.
|
| [2] |
李苹苹, 苗纯萍, 陈玮, 等. 城市街谷行道树对PM2.5浓度影响的数值模拟研究[J]. 生态学杂志, 2021, 40(12):4044-4052.
|
| [3] |
蒋应红. 国内外城市行道树综述[J]. 中国市政工程, 2020(6):4-6,109.
|
| [4] |
王伟. 行道树栽植养护技术[J]. 河南农业, 2019(35):33,35.
|
| [5] |
商艳上, 苏田, 李臻, 等. 园林行道树复壮技术[J]. 现代农业科技, 2021(12):176-177.
|
| [6] |
李秋洁, 童岳凯, 薛玉玺, 等. 基于YOLACT的行道树靶标点云分割方法[J]. 林业工程学报, 2022, 7(4):144-150.
|
| [7] |
白秋薇, 张信, 罗红品, 等. 设施果园自动对靶精准变量施肥控制系统[J]. 农业工程学报, 2021, 37(12):28-35.
|
| [8] |
郑加强, 徐幼林. 环境友好型农药喷施机械研究进展与展望[J]. 农业机械学报, 2021, 52(3):1-16.
|
| [9] |
焦祥, 张慧春, 郑加强, 等. 基于农林植物表型的智能喷雾机械研究进展[J]. 世界林业研究, 2020, 33(5):42-46.
|
| [10] |
袁鹏成, 李秋洁, 邓贤, 等. 基于LiDAR的对靶喷雾实时控制系统设计与试验[J]. 农业机械学报, 2020, 51(S1):273-280.
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
陆清屿, 李秋洁, 童岳凯, 等. 基于Mask R-CNN的行道树实例分割方法[J]. 林业工程学报, 2021, 6(5):154-160.
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
李天, 何雄奎, 王志翀, 等. 基于LiDAR技术的喷雾量三维空间分布测试方法[J]. 农业工程学报, 2021, 37(6):42-49.
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
周志华. 机器学习[M]. 北京: 清华大学出版社, 2016.
|
/
| 〈 |
|
〉 |





