 PDF(3088 KB)
PDF(3088 KB)

An improved CART model for leaf and wood classification from LiDAR point clouds of Quercus glauca individual trees
PAN Zhengshang, MA Kaisen, LONG Yi, LAI Zhengui, SUN Hua
Journal of Nanjing Forestry University (Natural Sciences Edition) ›› 2024, Vol. 48 ›› Issue (4) : 123-131.
PDF(3088 KB)
 PDF(3088 KB)
PDF(3088 KB)
An improved CART model for leaf and wood classification from LiDAR point clouds of Quercus glauca individual trees
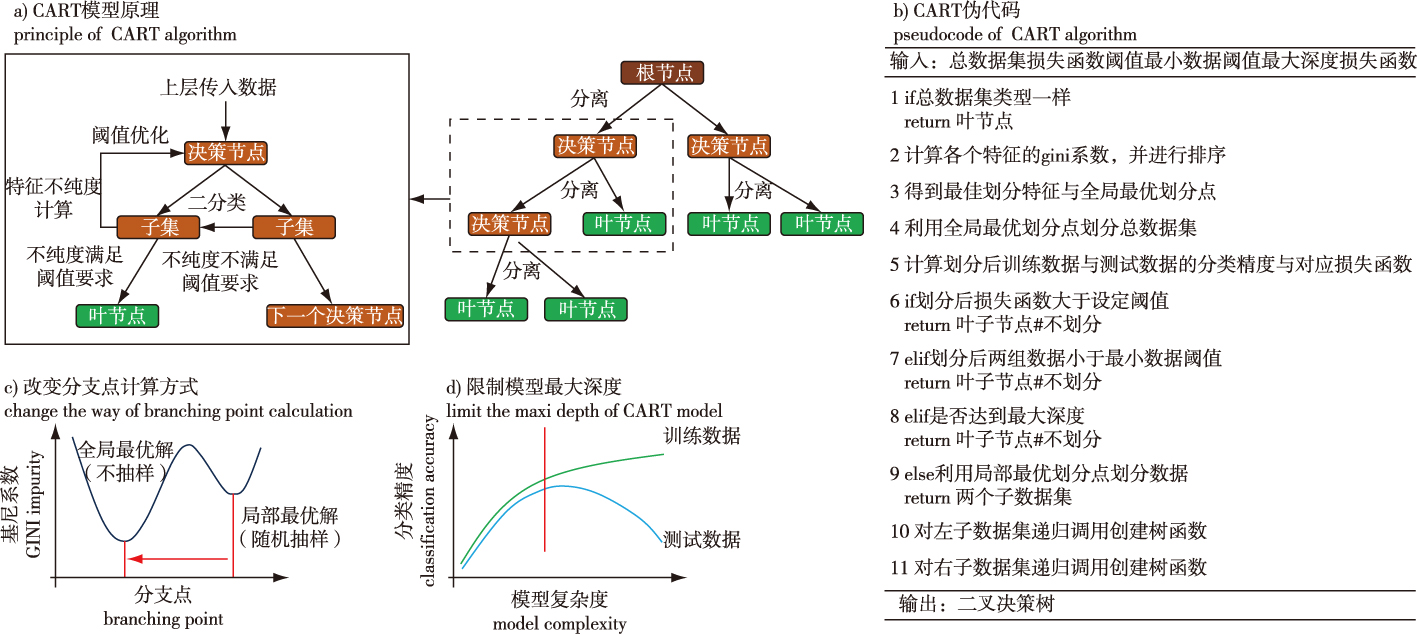
【Objective】Due to the complex structure and features, traditional classification models for tree branches and leaf point clouds typically face several problems, including poor stability, low accuracy, model overfitting, and high computational costs. In this study, we propose an improved CART (classification and regression tree) model for leaf and branch classification based on Quercus glauca individual tree point cloud data from terrestrial laser LiDAR.【Method】First, the feature descriptor was constructed according to the neighborhood points, and the optimal value of the neighborhood search parameter was then determined. The CART model was improved by gradually introducing variables and adjusting the structure of the decision tree. The classification results of the improved CART model were compared with those of the Logistics regression and K-nearest neighbor (KNN) models.【Result】The accuracy of the improved CART model using the test data increased after introducing the feature descriptors as variables, exceeding that of the Logistics regression and KNN model by 13.1% and 13.6%, respectively. Moreover, the improved CART model exhibited higher accuracy, better stability, and marked reduced model size following the improvement. In particular, the model size was reduced by 99.9% compared with before the improvement, while the data training time was only 51.3% of that before the adjustment. The comprehensive evaluation index of the improved CART model was approximately 0.9 on both trunk and leaf data, with the difference between accuracy on train data and test data lower than 0.001, indicating no overfitting.【Conclusion】The improved CART model has a high accuracy and stability, and achieves good classification results on small samples. This study provides a methodological reference for the accurate and rapid classification of trunk and leaf point clouds from terrestrial laser LiDAR.
terrestrial laser LiDAR / point cloud classification / point cloud features / classification and regression tree
| [1] |
|
| [2] |
杨必胜, 董震. 点云智能研究进展与趋势[J]. 测绘学报, 2019, 48(12):1575-1585.
|
| [3] |
孙圆, 林秀云, 熊金鑫, 等. 基于地面激光强度校正数据的单木枝叶分离[J]. 中国激光, 2021, 48(1):0104001.
|
| [4] |
|
| [5] |
夏国芳, 胡春梅, 曹毕铮, 等. 激光入射角度对点云反射强度的影响研究[J]. 激光杂志, 2016, 37(4):11-13.
|
| [6] |
曹伟, 陈动, 史玉峰, 等. 激光雷达点云树木建模研究进展与展望[J]. 武汉大学学报(信息科学版), 2021, 46(2):203-220.
|
| [7] |
黄亮, 许文雅, 谭帅. 树木三维点云的枝叶分割方法[J]. 北京测绘, 2022, 36(1):18-22.
|
| [8] |
|
| [9] |
林筱涵, 李爱农, 边金虎, 等. 基于网络图的地基激光雷达复杂树木点云枝叶分离方法[J]. 遥感技术与应用, 2022, 37(1):161-172.
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
赵江洪, 窦新铜, 曹月娥, 等. 一种基于分割结果实现三维点云分类的方法[J]. 测绘科学, 2022, 47(3):85-95.
|
| [15] |
|
| [16] |
汪献义, 邢艳秋, 尤号田, 等. 基于近邻几何特征的TLS林分点云分类研究[J]. 北京林业大学学报, 2019, 41(6):138-146.
|
| [17] |
麻卫峰, 王金亮, 张建鹏, 等. 一种改进法向量估算的点云特征提取[J]. 测绘科学, 2021, 46(11):84-90,146.
|
| [18] |
梁冲. 面向树木特征提取的室外场景点云数据语义分类[D]. 南京: 南京师范大学, 2021.
|
| [19] |
|
| [20] |
卢晓艺, 云挺, 薛联凤, 等. 基于树木激光点云的有效特征抽取与识别方法[J]. 中国激光, 2019, 46(5):411-422.
|
| [21] |
|
| [22] |
王艳秋, 徐传飞, 于戈, 等. 一种面向不确定对象的可见k近邻查询算法[J]. 计算机学报, 2010, 33(10):1943-1952.
|
| [23] |
刘刚, 尹一涵, 郑智源, 等. 基于三维点云的群体樱桃树冠层去噪和配准方法[J]. 农业机械学报, 2022, 53(S2):1-11.
|
| [24] |
张卉冉, 董震, 杨必胜, 等. 点云压缩研究进展与趋势[J]. 武汉大学学报(信息科学版), 2023, 48(2):192-205.
|
| [25] |
|
| [26] |
|
| [27] |
张继超, 刘宁, 宋伟东, 等. 一种特征选择的全极化雷达影像分类方法[J]. 测绘科学, 2022, 47(6):127-134.
|
| [28] |
卢华清, 伍吉仓, 张子健. 面向地基激光点云的树木枝叶分离[J]. 中国激光, 2022, 49(23):156-167.
|
| [29] |
|
| [30] |
邢艳秋, 蔡硕, 汪献义. 采用多尺度近邻体素特征的TLS林分点云分类[J]. 遥感信息, 2021, 36(5):1-7.
|
/
| 〈 |
|
〉 |





