 PDF(6665 KB)
PDF(6665 KB)

A single tree segmentation method for street trees facing side-looking MLS point clouds
YAN Yu, LI Qiujie, LI Weizheng
Journal of Nanjing Forestry University (Natural Sciences Edition) ›› 2024, Vol. 48 ›› Issue (6) : 166-174.
PDF(6665 KB)
 PDF(6665 KB)
PDF(6665 KB)
A single tree segmentation method for street trees facing side-looking MLS point clouds
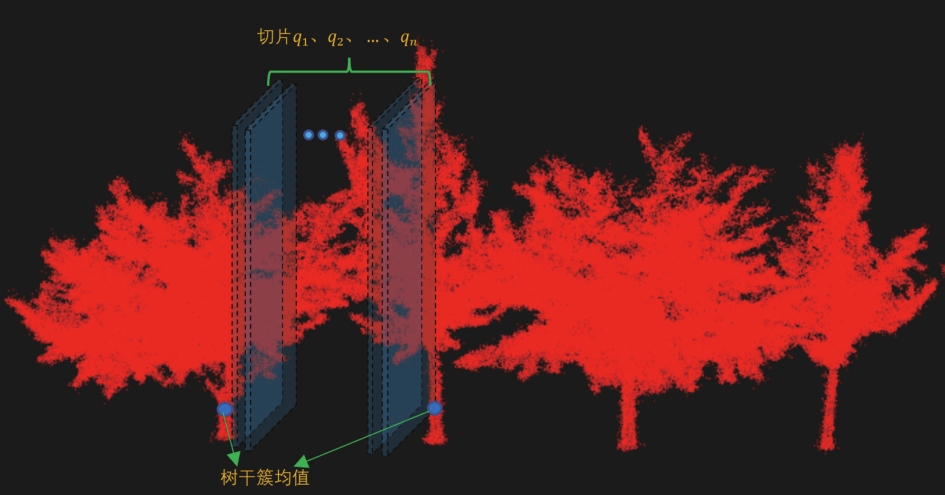
【Objective】Aiming at the problem of single tree segmentation of street trees in the investigation of street tree resources, a single tree segmentation method of street trees facing the side looking mobile laser scanning (MLS) point cloud was studied. The point clouds on both sides of the street scanned along the road direction were collected. A point cloud instance segmentation algorithm which can accurately implement single tree segmentation of street trees is established.【Method】The local features were extracted from the points in the point cloud, and the local features were input into the street tree point cloud detector to identify the street tree point cloud in the point cloud. For the identified street tree point clouds, the density-based spatial clustering of applications with noise (DBSCAN) was used to cluster the street tree clusters and filter out the street tree point clouds. The trunk point cloud of each street tree cluster was extracted, and several tree clusters were obtained using DBSCAN algorithm. The number of tree clusters contained in each street tree cluster was counted. For street tree clusters containing multiple trunk clusters, the method of vertical slicing and vertical cutting was used to divide the cluster into multiple single tree. The method of combining DBSCAN and K-nearest neighbor (KNN) was used to segment a single street tree in fine order to obtain the final tree segment result. The point cloud data on both sides of the street were collected, and three sets of experiments were carried out: street tree point cloud detector training, fine segmentation accuracy test and algorithm comparison.【Result】The accuracy rate, recall rate and F1 score of the street tree segmentation method facing side-looking MLS point cloud were 0.970 4, 0.951 0 and 0.960 6, respectively, which were superior to the two existing methods of first recognition and then segmentation.【Conclusion】The proposed method can accurately segment street trees in MLS point cloud, and save labor cost for street tree resource investigation.
street tree single tree segmentation / mobile laser scaning (MSL) / random forest / DBSCAN clustering / LiDAR
| [1] |
金小军, 张军, 杨凡, 等. 城市行道树生长健康状况与种植形式的相关性分析[J]. 城市建筑, 2021, 18(34):188-192.
|
| [2] |
|
| [3] |
商艳上, 苏田, 李臻, 等. 园林行道树复壮技术[J]. 现代农业科技, 2021(12):176-177.
|
| [4] |
许秋颖. 城市行道树种植存在的问题及其养护管理措施[J]. 现代园艺, 2019(22):180-181.
|
| [5] |
刘智能, 张红锋, 徐瑾. 西藏行道树资源调查与结构特征分析[J]. 四川大学学报(自然科学版), 2019, 56(1):173-181.
|
| [6] |
|
| [7] |
郝红科. 基于机载激光雷达的森林参数反演研究[D]. 杨凌: 西北农林科技大学, 2019.
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
于挺, 杨军. 基于K近邻卷积神经网络的点云模型识别与分类[J]. 激光与光电子学进展, 2020, 57(10):355-363.
|
| [26] |
薛玉玺, 李秋洁. 基于移动激光扫描的行道树靶标实时检测[J]. 林业工程学报, 2023, 8(1):150-156.
|
| [27] |
|
| [28] |
|
/
| 〈 |
|
〉 |





